Abstract: This half-day workshop is motivated by current demands in networked control applications with multiple asynchronous sensors that operate at different non-uniform frequencies. A few applications include flight control systems, chemical plants, and smart grid networks. The workshop presents a new approach for multi-rate sampled-data control of a fly-by-wireless quadrotor using three feedback loops: attitude control loop, velocity control loop, and position control loop (see Fig. 1 and Fig. 2). The proposed multi-loop controller operates over a network of sensors. Each sensor corresponds to one of the control loops and is dedicated to sampling the attitude, the velocity, or the position of the quadrotor. The control signals in each loop are computed at different rates which are dictated by the corresponding sensor of the control loop. Two results are presented in the first part of the workshop. Given the controller gains, the first result provides sufficient Krasovskii-based conditions for finding the lowest allowable sampling frequency for each control loop such that stability of the closed-loop system is guaranteed. The second result provides a controller synthesis algorithm and sufficient conditions guaranteeing stability of the closed-loop system. The effectiveness of the proposed multi-loop controller, in comparison with single-loop single-rate control schemes, is demonstrated through simulations. In particular, the results show that increasing the sampling frequency of a control loop, allows a designer to decrease the sampling frequency of the other control loops below the limit imposed by the single-rate case. Using the technique proposed in this workshop, an engineer can thus select the proper combination of sampling frequencies for a specific application, based on the price, availability, performance, power requirements, weight, maintenance costs, and other characteristics of the sensors. The second part of the workshop focuses on multi-rate observer design for the quadrotor and the third part focuses on controller design based on a hybrid model of the quadrotor.
Fig. 1. Quadrotor
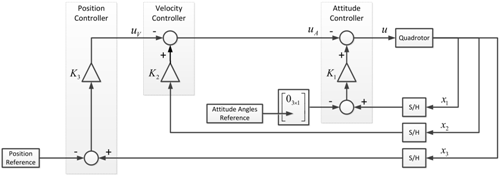
Fig. 2. Schematic diagram of the multi-loop control structure. The symbol S/H represents a sample-and-hold device.
Workshop goals: The goal of this workshop is to introduce researchers to
Synopsis of workshop content and major topics: The workshop will be divided into three sections:
Intended audience: The workshop is targeted at graduate researchers with interests in control theory (sampled-data systems, linear systems, optimization) and robotic applications (quadrotors, sensors, actuators, and microcontrollers). We expect a mixed audience from academia (students and professors) and industry.
Workshop length and schedule: Total workshop time: 3 hours and 45 minutes; plus two 15 minute coffee breaks
Prerequesites: